La tétracycline, connue sous le nom commercial Sumycin, agit en bloquant la fixation de l’ARNt sur la sous-unité 30S ribosomale, interrompant l’élongation de la chaîne protéique bactérienne. Ce mécanisme confère une activité sur un spectre large, incluant bactéries Gram positives, Gram négatives, rickettsies et spirochètes. Sa biodisponibilité digestive varie selon la prise alimentaire et les interactions avec les ions divalents comme calcium et magnésium. Sa diffusion tissulaire est importante, notamment dans les voies respiratoires et génito-urinaires. L’élimination se fait par voie rénale et biliaire. Les effets indésirables incluent photosensibilisation, troubles digestifs et coloration dentaire en cas d’administration précoce. Les guides thérapeutiques mentionnent sumycin prix, en soulignant la nécessité de restreindre son utilisation afin de limiter les résistances acquises.
Estimating turning movement volumes titlepage
Estimating Turning Movement Volumes for Large Occluded
formulated as an Origin-Destination matrix estimationproblem. Our method shows superiority to ALGS in
One well known practical method for estimating
terms of accuracy and robustness to observation error. Turning Movement Volumes at 4-leg roundabouts is the
In Section 2, we present a brief overview of cur-
Algebraic Solution (ALGS). We present an extension
rent methods used to estimate TMVs. In particular,
to the ALGS method called the Quadratic Program-
Origin-Destination based methods are discussed in Sec-
ming Algebraic Solution (QPALGS). The accuracy of
tion 2.1 and the ALGS method is explored in Section
the two methods is compared, and the QPALGS method
In Section 3, we present our extension to the
is shown to have superior accuracy to ALGS.
ALGS method called the Quadratic Programming Al-gebraic Solution (QPALGS). The TMV error of boththe QPALGS method and the ALGS method are char-
acterized with respect to observation error in Section4.
Turning Movement Volumes (TMV) are the total
sums of movements through a roundabout or inter-
section during a specified period of time, typically a15 minute period called a bin. During a given bin,
The utility of various field estimation techniques
each vehicle’s path from entry to exit is recorded to
may be characterized by their cost, complexity, inva-
obtain the total numbers for each origin and destina-
siveness, accuracy, and robustness to observation error.
tion. The collection of TMVs is an important factor
The techniques may be categorized into direct, statisti-
in the analysis of intersections and roundabouts; often
cal and algebraic methods. Examples of direct methods
used in determining capacity as well as ensuring safe
include marking vehicles [5] and telephone surveys [6].
and efficient operation. Standard intersections are rel-
Direct methods are often criticized for not accurately
atively straightforward to count, but for large occluded
representing true volumes due to their invasive nature.
roundabouts, the size, occlusions, and constant vehicle
Statistical methods like Sequential Quadratic Pro-
movement makes TMV counting very challenging. It
gramming (SQP) [5] can be accurate provided reliable
is difficult and costly to track a vehicle from entry at
sampled data is obtained. They rely on observations
one leg through circulation to exit at another. Fur-
of approach input/output volumes and direct samples
thermore, the constant entry of new vehicles from all
of TMV proportions. These methods differ in terms of
legs makes it difficult to record every vehicle. For these
the importance placed on input/output volumes, opti-
reasons, manual counting is often ruled out as a viable
mization algorithms and sampling procedures. Unfor-
tunately, due to the nature of large occluded round-
Field estimation techniques have become an impor-
abouts, directly sampling TMVs is not feasible and so
tant tool for the collection of TMVs at roundabouts.
the methods are not used in practice. Most formula-
One well known practical estimation technique is the
tions of statistical methods may be expressed in terms
ALGS method (see Section 2.2). It is non-invasive,
of the general Origin-Destination problem (see Section
cost effective and logistically simple, but suffers from
high errors. We present an extension of this method
Algebraic methods solve for TMVs given easily
collected observations. The most common algebraicmethod is discussed in Section 2.2.
All methods suffer from two main sources of obser-
vation error: counter error and bin assignment. Binassignment error is a natural artifact of the assignmentof vehicle movements into 15 minute bins. It arisesfrom the ambiguity in bin assignment for vehicles tak-ing the considerable amount of time required to com-plete a movement at a roundabout. Counter error maybe minimized at increased cost. Bin error is generallynot addressed but may be reduced through the use ofvideo collection and intensive analysis.
In any transportation network where there is a fixed
set of zones where a vehicle may enter or exit, we maytalk about the Origin-Destination (O-D) trip matrix. The entries of the O-D matrix, tij are the total numberof vehicles entering at zone i and exiting at j. Exten-sive research exists on the general problem of estimat-ing the unknown O-D matrix given point observationson links within the network [1]. Indeed, roundaboutshave been modelled in this way. Statistical methods forestimating TMVs at roundabouts, including SQP, haveincorporated techniques from this area. In all cases, theobservations used do not provide enough informationto completely determine the TMVs. Effective sampling
Figure 1. Circulating, Out, In, and Next Vol-
is required to provide enough reliable prior information
umes algebraically expressed in terms of the turning movement volumes
origin to their destination and that no u-turns are per-
The ALGS [5] method approaches the problem of
formed. Figure 1 shows the relationships between turn-
finding the TMVs as an algebraic problem relating the
ing movements and the exact COIN volumes as de-
TMVs to measurable observations and a number of as-
scribed in [7]. Traditionally the ALGS method has
only been formulated for 4-leg roundabouts. We denote
For each bin, simple point observations are collected
the 16 unknown origin-destination TMVs as t
at each leg using the following guidelines:
i ∈ {0, 1, 2, 3} is the leg of origin, and j ∈ {0, 1, 2, 3} is
In The number of vehicles entering the roundabout at
the destination. The relations for leg 0 can be written
Out The number of vehicles exiting the roundabout
Circulating The number of vehicles entering or pass-
ing a given leg without exiting at the next leg
Next The number of right turns for North American
Where C0 is the Circulating volume at leg 0; O0 is
We refer to these standard observations as the Cir-
the volume of Outs; I0 is the volume of Ins at leg 0; and
culating, Out, In, and Next volumes (COIN). The as-
N0 is the volume of Next turns. The expressions for
sumptions are that vehicles navigate directly from their
legs 1,2, and 3 are similar. Eq. (1b) - (1d) contain all
of the COIN observations, while Eq. (1a) and Eq. (1e)
A is a 20 × 16 matrix populated with coefficients from
encode the assumptions made in [7]. Extending the 5
equations in Eq. (1) to all 4 legs gives 20 equationsfor 16 unknowns. Provided the COIN observations are
t is the column vector of unknown TMVs tij for all
exact and the assumptions are met, Eqns. (1) are con-
sistent and admit a unique solution as given in [7], and
Notice that this system cannot, in general, be satisfied
with equality. Instead, the idea from GLS is to definea cost function:
Here, the cost function represents the L2 distance
between the COIN volumes for a proposed set of TMVs
However, even when small observation errors are
mize the distance in Eq. (4) by solving the following
present, the solutions from Eq. (2) often result in large
errors in the TMVs [5] including negative volumes (seeSection 4). Unfortunately the ALGS method is par-
ticularly susceptible to binning error since a vehicle
executing a movement at a bin boundary may be split
across the boundary resulting in errors in the COIN ob-
servations in both bins. This may be resolved through
We would like our estimate to be in the domain of
the use of video collection units and intensive video
TMVs, which requires each component to be a non-
processing for proper time bin assignment which is be-
negative integer. Denote the unknown optimal integer
yond the scope of the current discussion.
solution by t∗Z ∈ Z16. The convexity of the objectivefunction provides that:
• It is practical to find the relaxed solution t∗ ∈ R16
The traditional ALGS method reduces the 20 equa-
tions to 16 by eliminating redundant information. Un-
• t∗Z may be found by searching the neighbours in
fortunately, this process is only valid for perfect COINobservations. When subject to observation error, the
Z16 around t∗ requiring 216 evaluations of the ob-jective function.
(possibly inconsistent) equations in Eqns. (1) actu-ally represent multiple samples rather than redundant
• Alternatively, rounding to integers has a guaran-
information. Simply using Eqns. (2) amounts to se-
teed error bound round(t∗ ) − t∗Z ≤ 1 for all i, j.
Instead, we treat the TMV estimation as a special
For expedience, we use rounding. The result is a set of
case of the O-D trip matrix estimation problem [1],
non-negative integer TMV estimates which best agree
[6]. We employ the Generalized Least Squares (GLS)
with the COIN observations and our assumptions si-
solution as described in [4], [3], and [1]. The GLS is
capable of incorporating a known prior distribution of
The objective function in Eq. (4) is not necessar-
TMVs. For large occluded roundabouts it is not fea-
ily exclusive to COIN observations. Other observa-
sible to sample TMVs. We use the u-turn assumption
tions or prior knowledge may easily be incorporated
as our prior distribution and consider any value for the
as additional linear equations. Indeed, with sufficient
other turning movements equally likely. In using this
additional observations it is practical to make similar
method, we keep all of the original information from
estimations for TMVs at 5-leg roundabouts.
the 20 equations represented by Eq. (1). We denotethis by the over-determined linear system
f is the column vector of our observations of COIN
Given a known error in COIN observations, we
would like to know the accuracy of our TMV estimates. Figure 2. RRMSE (see Eq. 6) vs. Observation Error for the ALGS method (×) and the QPALGS method (⊙). Left, low volume: µV = 10 vehicles per movement per 15 minutes. Right, high volume: µV = 47.5 vehicles per movement per 15 minutes. Table 1. RRMSE for QPALGS and ALGS methods for observation error of 3% to 8% for high volume traffic (47.5 vehicles per movement per 15 minutes)
Thus the relative error in the estimated TMVs, de-
the ALGS method was performed on the same data set
noted ∆t/t, as a function of the relative error in the
as QPALGS. The simulation was intended to present
COIN observations, denoted ∆f /f , is critically impor-
the typical error for 15 minute binned data in the case
tant. Case studies [5] have previously been conducted
of low, but non-zero u-turns. For each given obser-
to establish practical estimates on the error of ALGS.
vation error e = ∆f /f in the range 0% to 15%, and
For O-D based methods, Cascetta [4] formulated an
average movement volume µV , we simulated 10, 000 15
analytical expression for the covariance of the Aitken
minute bins of complete roundabout data by the fol-
estimator[2]. Unfortunately, the expression is only ap-
plicable when the solution domain is extended to real
1. For each non-uturn movement from approach i to
numbers and the non-negativity constraint from Eq.
j, i = j, generate a count by drawing from a nor-
mal distribution with mean µV and standard de-
In [5], Dixon reported the Mean Absolute Percent
viation 10% × µV and round to the nearest non-
Error (MAPE) as a measure for comparing estima-
tion procedures. Observation error was not discussed. The expression for the covariance provided in [4] does
2. For each u-turn movement, generate a count of 0,
provide a relationship between ∆f and ∆t. Unfortu-
1, 2, 3, or 4 with probability 85.5%, 7.70%, 3.85%,
nately, the form expressed is not a relative error and
1.93%, or 0.97%. Note, the expected number of u-
does not generalize. Thus [5] and [4] fail to provide a
turns is 1, slightly violating the u-turn assumption.
relationship between ∆f /f and ∆t/t.
3. Let ttrue be the TMVs generated in 1 and 2. Gen-
To determine the relationship between ∆t/t and
erate the corresponding COIN volumes f true using
∆f /f , a simulation was performed. For comparison,
4. Generate noisy COIN observations based on the
ideal measurement f true. The kth observation f obsis generated from a normal distribution with mean
This paper has outlined a new method for estimating
f true and standard deviation e% × f true.
Turning Movement Volumes at large occluded round-abouts. The new method, QPALGS is an extension
5. repeat steps 1-4 for N = 10, 000 15 minute bins.
to the ALGS method using Origin-Destination matrixestimation theory. The new method is non-invasive,
The noisy COIN observations f obss are representative
accurate and robust to observation error. In practice,
of counts collected by counters with known relative
the TMVs can be expected to be accurate ±11.3% for
error e. The simulation was performed for both low
observation error ±4%. The method has the potential
and high volume scenarios corresponding to means of
to be extended to roundabouts with more legs.
µV = 10 vehicles per 15 minutes and µV = 47.5 vehi-cles per 15 minutes. For each f obs, the ALGS andQPALGS TMV estimates were computed and com-
pared to the known ttrue. Note, often the resultingALGS volumes were negative. For high observation
error, negative volumes became prevalent occurring in
destination matrices using traffic counts- a litera-
63% of the bins. The relative error in the TMV es-
ture survey. Working paper, International Institute
timates was measured using the Relative Root Mean
[2] AC Aitken. On least squares and linear combina-
tion of observations. Proc. R. Soc. Edinb, 55:42–48,
destination matrices by constrained generalised
where m is the method (ALGS or QPALGS). The
RRMSE was preferred over the MAPE [5] or the es-
Methodological, 25(1):13 – 22, 1991.
timator’s covariance matrix [4] because the RRMSEcharacterizes both the bias and precision of the esti-
[4] Ennio Cascetta. Estimation of trip matrices from
mated TMV (the MAPE does not), and is a relative
traffic counts and survey data: A generalized least
squares estimator. Transportation Research Part B:
Figure 2 presents the relationship between the ob-
Methodological, 18(4-5):289 – 299, 1984.
servation error and the error in the estimated TMVsfor both QPALGS (⊙) and ALGS (×). The value of
[5] Michael P. Dixon, Ahmed Abdel-Rahim, Michael
N = 10, 000 was chosen to obtain a precision of ±.05%
for the RRMSE. Table 1 shows a subset of data ex-
Rodegerdts. Field evaluation of roundabout turn-
tracted from Figure 2. Figure 2 and table 1 are in-
ing movement estimation procedures. Journal of
tended to be used to establish the accuracy of a par-
Transportation Engineering, 133(2):138–146, 2007.
ticular study given a known or estimated observation
error. For example, if a roundabout study is performed
destination demands from links and probe counts.
with high average movement volume and the counters
Depertment of Civil Engineering, Queens Univer-
are known to be accurate ±4% then the expected error
in the TMVs is ±11.3% for QPALGS (⊙) or ±15.3%for ALGS (×). Figure 2 clearly shows that QPALGS
[7] Bruce W. Robinson, Joe Georges. Bared, United
outperforms the ALGS in all cases. In addition, the
States., Turner-Fairbank Highway Research Cen-
QPALGS exhibits a robustness to observation error far
ter., Kittelson, and Associates. Roundabouts : an
superior to the ALGS method. Table 1 clearly shows
informational guide / [principal investigator, Bruce
the importance of knowing and minimizing observation
W. Robinson]. U.S. Dept. of Transportation, Fed-
error. With the use of Automated Traffic Data Collec-
eral Highway Administration, [Washington, D.C.]
tion solutions such as Miovision Technologies Inc., ob-
servation error can be minimized guaranteeing TMVaccuracy in excess of 88%. Without such guaranteesand using traditional methods, TMV accuracy can eas-ily be less than 70%.
Dosering: In 1 pufje zit 100 mcg. In 1 inhalatie via de Ventolin diskus zit 200 mcg. Salbutamol 100 / 200 microgram zo nodig puff(s) Start Salbutamol Je start de toediening van Salbutamol zodra de eerste verschijnselen/klachten optreden: Werking Bij correct inhaleren werkt Salbutamol binnen 10 à 15 minuten. Mocht een pufje niet goed zijn gegaan kan je deze puf gerust nogmaals herhalen. Salbut
Important Information about Your 2009 Prescription Drug Benefit Throughout my years of practicing medicine, I’ve found that getting the best buy takes action… even with prescription drugs. I’d like to explain what a best buy is when it comes to your prescriptions — and the steps you can take to find it. Here’s what I mean by a best buy . When thinking about a drug, y
 Estimating Turning Movement Volumes for Large Occluded
formulated as an Origin-Destination matrix estimationproblem. Our method shows superiority to ALGS in
One well known practical method for estimating
terms of accuracy and robustness to observation error.
Estimating Turning Movement Volumes for Large Occluded
formulated as an Origin-Destination matrix estimationproblem. Our method shows superiority to ALGS in
One well known practical method for estimating
terms of accuracy and robustness to observation error.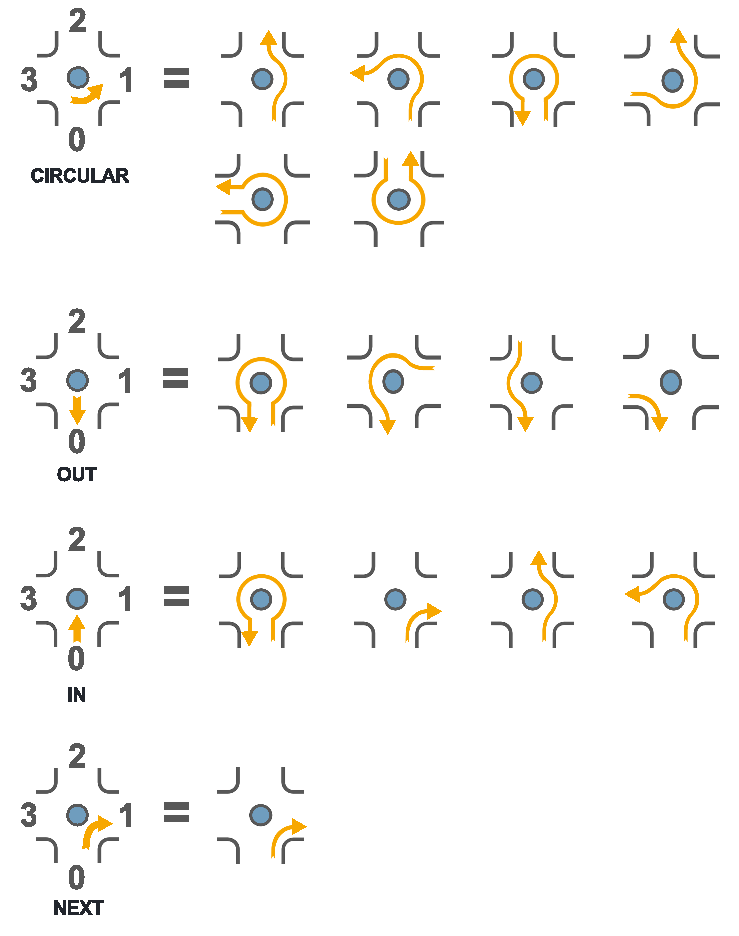 collected observations. The most common algebraicmethod is discussed in Section 2.2.
collected observations. The most common algebraicmethod is discussed in Section 2.2.